Pöörleva energia. Pöörlemise kineetiline energia. Inertsmoment. Vägede töö määramise juhtumid
« Füüsika - klass 10 "
Miks pöörlemise nurkkiiruse suurendamiseks venib uisutaja piki pöörlemistelge.
Kas helikopter peaks pöörlema, kui propeller pöörleb?
Esitatud küsimused viitavad sellele, et kui välised jõud kehale ei mõju või nende tegevus on kompenseeritud ja üks kehaosa hakkab ühes suunas pöörlema, peaks teine osa pöörlema teises suunas, täpselt nagu kütuse väljalaskmisel. rakett, liigub rakett ise vastupidises suunas.
Impulsi hetk.
Kui arvestada pöörleva kettaga, on ilmne, et ketta koguimpulss on võrdne nulliga, kuna mis tahes kehaosake vastab osakesele, mis liigub sama kiirusega absoluutväärtuses, kuid vastupidises suunas (joonis 6.9). ).
Kuid ketas liigub, kõigi osakeste pöörlemiskiirus on sama. Siiski on selge, et mida kaugemal on osake pöörlemisteljest, seda suurem on selle hoog. Järelikult on pöörleva liikumise jaoks vaja lisada veel üks impulsiga sarnane omadus - nurkkiirus.

Ringis liikuva osakese impulssmomenti nimetatakse osakese impulsi korrutiseks selle kauguse ja pöörlemistelje vahel (joonis 6.10):
Lineaar- ja nurkkiirused on seotud suhtega v = ωr, siis
Kõik tahke aine punktid liiguvad fikseeritud pöörlemistelje suhtes sama nurkkiirusega. Tugevat keha saab kujutada materiaalsete punktide kogumina.
Jäiga keha impulssmoment on võrdne inertsimomendi ja pöörlemiskiiruse korrutisega:
Nurkkiirus on vektori suurus, valemi (6.3) kohaselt suunatakse nurkkiirus samamoodi nagu nurkkiirus.
Pöörleva liikumise dünaamika põhivõrrand impulsi kujul.
Keha nurkkiirendus on võrdne nurkkiiruse muutusega, jagatuna ajavahemikuga, mille jooksul see muutus toimus: asendage see avaldis pöörleva liikumise dünaamika põhivõrrandiga ![]() seega I (ω 2 - ω 1) = MΔt või IΔω = MΔt.
seega I (ω 2 - ω 1) = MΔt või IΔω = MΔt.
Seega,
ΔL = MΔt. (6.4)
Nurgamomendi muutus on võrdne kehale või süsteemile mõjuvate jõudude kogumomendi korrutisega nende jõudude toimimise ajaks.
Nurgajõu säilitamise seadus:
Kui kehale või fikseeritud pöörlemisteljega kehade süsteemile mõjuvate jõudude kogumoment on võrdne nulliga, siis on ka nurkkiiruse muutus võrdne nulliga, s.t süsteemi nurkkiirus jääb konstantseks.
ΔL = 0, L = konst.
Süsteemi impulsi muutus on võrdne süsteemile mõjuvate jõudude koguimpulsiga.
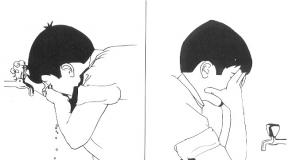
Pöörlev uisutaja sirutab käed külgedele, suurendades seeläbi inertsimomenti, et vähendada pöörlemise nurkkiirust.

Nurkkiiruse säilimise seadust saab demonstreerida järgmise katse abil, mida nimetatakse "eksperimendiks Žukovski pingiga". Inimene seisab pingil, mille keskpunkti läbib vertikaalne pöörlemistelg. Mees hoiab käes hantleid. Kui pink on pöörlema pandud, saab inimene muuta pöörlemiskiirust, vajutades hantlid rinnale või langetades käed alla ja seejärel laiali. Käsi laiali sirutades suurendab ta inertsimomenti ja pöörlemise nurkkiirus väheneb (joonis 6.11, a), langetades käsi, vähendab ta inertsimomenti ja pingi pöörlemiskiirus suureneb (joonis 6.11). , b).
Inimene saab ka pinki mööda serva kõndima panna. Sel juhul pöörleb pink vastupidises suunas, kuna kogu nurkkiirus peaks jääma nulli.
Güroskoopideks nimetatavate seadmete tööpõhimõte põhineb nurkkiiruse säilimise seadusel. Güroskoobi peamine omadus on pöörlemistelje suuna säilitamine, kui sellele teljele ei mõju välisjõud. XIX sajandil. meremehed kasutasid merel orienteerumiseks güroskoope.
Kineetiline energia pöörlev tahke aine.
Pöörleva tahke aine kineetiline energia on võrdne selle üksikute osakeste kineetiliste energiate summaga. Jagame keha väikesteks elementideks, millest igaüks võib olla materiaalne punkt. Siis on keha kineetiline energia võrdne materiaalsete punktide kineetiliste energiate summaga, millest see koosneb:
Keha kõigi punktide pöördenurk on sama, seetõttu
Sulgudes olev väärtus, nagu me juba teame, on jäiga keha inertsimoment. Lõpuks on fikseeritud pöörlemisteljega jäiga keha kineetilise energia valem vorm
Jäiga keha üldise liikumise korral, kui pöörlemistelg on vaba, on selle kineetiline energia võrdne translatsiooniliste ja pöörlevate liikumiste energiate summaga. Niisiis, ratta kineetiline energia, mille mass on koondunud veljele ja veereb mööda teed ühtlase kiirusega, on võrdne
Tabelis võrreldakse materiaalse punkti translatsiooniliikumise mehaanika valemeid sarnaste valemitega jäiga keha pöörlemisliikumiseks.

Ülesanded
1. Tehke kindlaks, mitu korda on efektiivne mass suurem kui 4000 tonni rongi gravitatsioonimassist, kui rataste mass on 15% rongi massist. Pidage rattaid ketasteks läbimõõduga 1,02 m. Kuidas muutub vastus, kui rataste läbimõõt on kaks korda väiksem?
2. Määrake kiirendus, millega 1200 kg kaaluv rattapaar veereb allamäge, mille kalle on 0,08. Pidage rattaid ketasteks. Veeretakistuskoefitsient 0,004. Määrake rataste haardumisjõud rööbaste külge.
3. Määrake kiirendus, millega 1400 kg kaaluv rattapaar veereb üles mäest, mille kalle on 0,05. Vastupidavustegur 0,002. Milline peaks olema haardetegur, et rattad ei libiseks. Pidage rattaid ketasteks.
4. Tehke kindlaks, millise kiirendusega veereb 40 tonni kaaluv auto 0,020 kallakuga mäest alla, kui tal on kaheksa ratast kaaluga 1200 kg ja läbimõõt 1,02 m. Määrake rataste haardumisjõud rööbastele. Vastupidavustegur 0,003.
5. Määrake piduriklotside survejõud rehvidele, kui 4000 t kaaluv rong pidurdab kiirusega 0,3 m / s 2. Ühe rattapaari inertsimoment on 600 kg · m 2, telgede arv 400, kinga libiseva hõõrdetegur 0,18 ja veeretakistustegur 0,004.
6. Määrake 60-tonnise massiga neliteljelisele autole mõjuv pidurdusjõud küüru piduriplatvormil, kui kiirus 30 m rajal on vähenenud 2 m / s 1,5 m / s. Ühe rattapaari inertsimoment on 500 kg · m 2.
7. Veduri kiirusmõõtur näitas rongi kiiruse suurenemist ühe minuti jooksul 10 m / s -lt 60 m / s -le. Tõenäoliselt oli juhtiva rattapaari libisemine. Määrake elektrimootori armatuurile mõjuv jõud. Rattapaari inertsimoment on 600 kg m 2, armatuur on 120 kg m 2. Käigukasti ülekandearv on 4,2. Survejõud rööbastele on 200 kN, rataste libisemishõõrdetegur rööbastel on 0,10.
11. ROTAARI KINETILINE ENERGIA
Liikumine
Tuletame pöörleva liikumise kineetilise energia valemi. Laske kehal pöörduda nurkkiirusega ω fikseeritud telje suhtes. Igasugune väike kehaosake teeb ringikujulise liikumise kiirusega kus r i - pöörlemistelje kaugus, orbiidi raadius. Osakeste kineetiline energia massid m i on võrdne. Osakeste süsteemi kogu kineetiline energia on võrdne nende kineetilise energia summaga. Võtame kokku kehaosakeste kineetilise energia valemid ja võtame summa märkist välja pool nurkkiiruse ruudu, mis on kõigi osakeste jaoks sama ,. Osakeste masside korrutiste summa nende pöörlemistelje kauguste ruutude järgi on keha inertsimoment pöörlemistelje suhtes . Niisiis, ümber fikseeritud telje pöörleva keha kineetiline energia võrdub poolega keha inertsmomendi korrutisest telje ümber pöörlemiskiiruse ruudu võrra:
Pöörlevate kehade abil saab salvestada mehaanilist energiat. Selliseid kehasid nimetatakse hooratasteks. Tavaliselt on need revolutsioonilised kehad. Hoorataste kasutamine pottseppades on teada juba antiikajast. Sisepõlemismootorites annab kolv töökäigu ajal hoorattale mehaanilist energiat, mis seejärel teeb tööd kolme järgneva löögi jaoks, et pöörata mootori võlli. Stantsides ja pressides ajab hooratas pöörlema suhteliselt väikese võimsusega elektrimootor, kogub mehaanilist energiat peaaegu täispöörde ajal ja annab lühikese löögihetkel tembeldustööle.
On mitmeid katseid kasutada pöörlevaid hoorattaid sõidukite juhtimiseks: autod, bussid. Neid nimetatakse mahomobiliks, gyrocariks. Selliseid eksperimentaalseid masinaid on loodud palju. Paljulubav oleks elektrirongide pidurdamisel energia salvestamiseks kasutada hoorattaid, et kogunenud energiat järgneva kiirenduse ajal ära kasutada. Hooratta energia salvestamist kasutatakse teadaolevalt New Yorgi metroorongides.
Mõelge kõigepealt jäigale kehale, mis pöörleb ümber fikseeritud telje OZ nurkkiirusega ω (Joonis 5.6). Murrame keha elementaarseteks massideks. Elementaarmassi lineaarne kiirus on võrdne, kus on selle kaugus pöörlemisteljest. Kineetiline energia i-elementaarne mass on võrdne
![]() .
.
Seetõttu koosneb kogu keha kineetiline energia selle osade kineetilistest energiatest
![]() .
.
Arvestades, et selle suhte paremal pool olev summa kujutab keha inertsimomenti pöörlemistelje suhtes, saame lõpuks
![]() . (5.30)
. (5.30)
Pöörleva keha kineetilise energia valemid (5.30) on sarnased keha translatsiooniliikumise kineetilise energia vastavate valemitega. Need saadakse viimasest ametlikust asendamisest ![]() .
.
Üldjuhul võib jäiga keha liikumist kujutada liikumiste summana - translatsioonikiirusega, mis on võrdne keha massikeskme kiirusega, ja pöörlemisega nurkkiirusega ümber hetkelise telje, mis läbib keha keskpunkti. mass. Sel juhul väljendub keha kineetilise energia väljendus
![]() .
.
Leiame nüüd töö, mida välisjõudude moment teeb jäiga keha pöörlemise ajal. Välisjõudude elementaarne töö ajas dt on võrdne keha kineetilise energia muutusega
Võttes arvesse pöörleva liikumise kineetilise energia erinevust, leiame selle juurdekasvu
 .
.
Vastavalt pöörleva liikumise dünaamika põhivõrrandile
Neid suhteid arvesse võttes toome vormi elementaarse töö väljenduse
kus on sellest tuleneva välisjõudude projektsioon pöörlemistelje OZ suunas, on keha pöörlemisnurk vaadeldava ajavahemiku jooksul.
Integreerides (5.31), saame valemi pöörlevale kehale mõjuvate välisjõudude tööks
Kui, siis on valem lihtsustatud
Seega määratakse väliste jõudude töö jäiga keha pöörlemisel fikseeritud telje suhtes nende jõudude momendi projektsiooni toimel sellel teljel.
Güroskoop

Güroskoop on kiiresti pöörlev sümmeetriline keha, mille pöörlemistelg võib muuta oma suunda ruumis. Et güroskoobi telg saaks ruumis vabalt pöörata, asetatakse güroskoop niinimetatud kardaani (joonis 5.13). Güroskoobi hooratas pöörleb sisemise rõnga puuris ümber oma raskuskeset läbiva C 1 C 2 telje. Sisemine puur võib omakorda pöörata välispuuris ümber C 1 C 2 risti asuva telje B 1 B 2. Lõpuks saab välimine puur riiuli laagrites vabalt pöörata ümber telje A 1 A 2, telgedega C 1 C 2 ja B 1 B 2 risti. Kõik kolm telge lõikuvad mingis fikseeritud punktis O, mida nimetatakse vedrustuse keskpunktiks või güroskoobi tugipunktiks. Kardaanil oleval güroskoopil on kolm vabadusastet ja seetõttu saab see teha pöördeid kardaani keskosa ümber. Kui güroskoobi vedrustuse keskpunkt langeb kokku selle raskuskeskmega, siis on güroskoobi kõigi osade raskusmoment vedrustuse keskpunkti suhtes null. Sellist güroskoopi nimetatakse tasakaalustatud.
Mõelgem nüüd güroskoobi kõige olulisematele omadustele, mis on leidnud sellele laialdast rakendust erinevates valdkondades.
1) Stabiilsus.
Tasakaalustatud güroskoobi loenduri mis tahes pöörlemisel jääb selle pöörlemistelg labori võrdlusraami suhtes muutumatuks. See on tingitud asjaolust, et kõigi välisjõudude moment, mis on võrdne hõõrdejõudude momendiga, on väga väike ja praktiliselt ei põhjusta güroskoobi nurkkiiruse muutust, s.t.
Kuna nurkkiirus on suunatud piki güroskoobi pöörlemistelge, peab selle suund jääma muutumatuks.
Kui väline jõud toimib lühikest aega, on integraal, mis määrab nurkkiiruse suurenemise väikeseks
![]() . (5.34)
. (5.34)
 See tähendab, et isegi suurte jõudude lühiajalise mõju all muutub tasakaalustatud güroskoobi liikumine vähe. Güroskoop on justkui vastu kõikidele katsetele muuta oma nurkkiiruse suurust ja suunda. See on põhjuseks märkimisväärsele stabiilsusele, mille güroskoobi liikumine omandab pärast selle kiiret pöörlemist. Seda güroskoobi omadust kasutatakse laialdaselt õhusõidukite, laevade, rakettide ja muude sõidukite liikumise automaatseks juhtimiseks.
See tähendab, et isegi suurte jõudude lühiajalise mõju all muutub tasakaalustatud güroskoobi liikumine vähe. Güroskoop on justkui vastu kõikidele katsetele muuta oma nurkkiiruse suurust ja suunda. See on põhjuseks märkimisväärsele stabiilsusele, mille güroskoobi liikumine omandab pärast selle kiiret pöörlemist. Seda güroskoobi omadust kasutatakse laialdaselt õhusõidukite, laevade, rakettide ja muude sõidukite liikumise automaatseks juhtimiseks.
Kui tegutsete güroskoobi järgi kaua aega konstantne välisjõudude momendi suunas, siis seatakse güroskoobi telg lõpuks välisjõudude momendi suunas. Seda nähtust kasutatakse güroskoopis. See seade on güroskoop, mille telge saab horisontaaltasapinnal vabalt pöörata. Maa igapäevase pöörlemise ja tsentrifugaaljõudude momendi mõjul pöörleb güroskoobi telg nii, et nurk ja muutub minimaalseks (joonis 5.14). See vastab güroskoobi telje asukohale meridiaanitasandil.
2). Güroskoopiline efekt.
 Kui pöörlevale güroskoobile rakendatakse paar jõudu ja see kipub pöörlema ümber telje, mis on risti pöörlemisteljega, siis pöörleb see esimese kahega risti oleva kolmanda telje ümber (joonis 5.15). Seda güroskoobi ebatavalist käitumist nimetatakse güroskoopiliseks efektiks. Seda seletatakse asjaoluga, et jõudude paari moment on suunatud piki telge О 1 О 1 ja vektori muutus väärtuse järgi on aja jooksul ühesuunaline. Selle tulemusel pöörleb uus vektor ümber telje О 2 О 2. Seega vastab güroskoobi esmapilgul ebaloomulik käitumine täielikult pöörleva liikumise dünaamika seadustele
Kui pöörlevale güroskoobile rakendatakse paar jõudu ja see kipub pöörlema ümber telje, mis on risti pöörlemisteljega, siis pöörleb see esimese kahega risti oleva kolmanda telje ümber (joonis 5.15). Seda güroskoobi ebatavalist käitumist nimetatakse güroskoopiliseks efektiks. Seda seletatakse asjaoluga, et jõudude paari moment on suunatud piki telge О 1 О 1 ja vektori muutus väärtuse järgi on aja jooksul ühesuunaline. Selle tulemusel pöörleb uus vektor ümber telje О 2 О 2. Seega vastab güroskoobi esmapilgul ebaloomulik käitumine täielikult pöörleva liikumise dünaamika seadustele
3). Güroskoobi pretsessioon.
Güroskoobi pretsessioon on selle telje koonusekujuline liikumine. See tekib siis, kui välisjõudude moment jääb suurusjärgus konstantseks, pöörleb samaaegselt güroskoobi teljega, moodustades sellega kogu aeg täisnurga. Pretsessiooni demonstreerimiseks võib kasutada laiendatud teljega jalgrattaratast, mis on vähendatud kiireks pöörlemiseks (joonis 5.16).
 Kui ratas on telje pikendatud otsaga riputatud, hakkab selle telg oma raskuse all vertikaaltelje ümber tõmbuma. Kiiresti pöörlev tipp võib olla ka pretsessiooni demonstratsioon.
Kui ratas on telje pikendatud otsaga riputatud, hakkab selle telg oma raskuse all vertikaaltelje ümber tõmbuma. Kiiresti pöörlev tipp võib olla ka pretsessiooni demonstratsioon.
Uurime välja güroskoobi pretsessiooni põhjused. Vaatleme tasakaalustamata güroskoopi, mille telg võib vabalt pöörata ümber mingi punkti O (joonis 5.16). Güroskoobile rakendatud raskusmoment on suurusjärgus võrdne
kus on güroskoobi mass, kas kaugus punktist O güroskoobi massi keskpunkti on nurk, mille moodustab güroskoobi telg vertikaalsega. Vektor on suunatud risti güroskoobi telge läbiva vertikaaltasandiga.
Selle hetke mõjul muutub güroskoobi nurkkiirus (selle alguspunkt on paigutatud punkti O) aja jooksul suurenemiseks ja güroskoobi telge läbiv vertikaaltasand pöörleb nurga all. Vektor on kogu ajaga risti, seega muutub suurus muutmata ainult suunda. Sellisel juhul on mõne aja pärast vektorite suhteline asukoht ja see on sama mis esialgsel hetkel. Selle tulemusena pöörleb güroskoobi telg pidevalt ümber vertikaali, kirjeldades koonust. Seda liikumist nimetatakse pretsessiooniks.
Määratleme pretsessiooni nurkkiiruse. Vastavalt joonisele 5.16 on koonuse telge ja güroskoobi telge läbiva tasapinna pöördenurk
kus on güroskoobi nurkkiirus ja kas selle suurenemine aja jooksul.
Jagades, võttes arvesse märgitud suhteid ja teisendusi, saame pretsessiooni nurkkiiruse
![]() . (5.35)
. (5.35)
Tehnoloogias kasutatavate güroskoopide puhul on pretsessiooni nurkkiirus miljoneid kordi väiksem kui güroskoobi pöörlemiskiirus.
Kokkuvõtteks märgime, et pretsessiooni nähtust täheldatakse ka aatomites elektronide orbiidi liikumise tõttu.
Näited dünaamikaseaduste rakendamisest
Pöörlev liikumine
 1. Mõelge mõned näited nurkkiiruse säilimise seadusest, mida saab rakendada Žukovski pingi abil. Kõige lihtsamal juhul on Žukovski pink kettakujuline platvorm (tool), mis võib kuullaagritel vabalt ümber vertikaaltelje pöörata (joonis 5.17). Demonstraator istub maha või seisab pingil, pärast seda pannakse see pöörleva liikumisega. Kuna laagrite kasutamisest tulenevad hõõrdejõud on väga väikesed, ei saa pingist ja demonstraatorist koosneva süsteemi nurkkiirus pöörlemistelje suhtes ajas muutuda, kui süsteem jäetakse enda teada. . Kui demonstrant hoiab käes raskeid hantleid ja sirutab käed külgedele, siis suurendab ta süsteemi inertsmomenti ja seetõttu peab pöörlemise nurkkiirus vähenema, nii et hoogmoment jääb muutumatuks.
1. Mõelge mõned näited nurkkiiruse säilimise seadusest, mida saab rakendada Žukovski pingi abil. Kõige lihtsamal juhul on Žukovski pink kettakujuline platvorm (tool), mis võib kuullaagritel vabalt ümber vertikaaltelje pöörata (joonis 5.17). Demonstraator istub maha või seisab pingil, pärast seda pannakse see pöörleva liikumisega. Kuna laagrite kasutamisest tulenevad hõõrdejõud on väga väikesed, ei saa pingist ja demonstraatorist koosneva süsteemi nurkkiirus pöörlemistelje suhtes ajas muutuda, kui süsteem jäetakse enda teada. . Kui demonstrant hoiab käes raskeid hantleid ja sirutab käed külgedele, siis suurendab ta süsteemi inertsmomenti ja seetõttu peab pöörlemise nurkkiirus vähenema, nii et hoogmoment jääb muutumatuks.
Vastavalt nurkkiiruse säilimise seadusele koostame selle juhtumi jaoks võrrandi
kus on inimese ja pingi inertsimoment ning kas hantlite inertsimoment esimeses ja teises asendis ning on süsteemi nurkkiirused.
Süsteemi pöörlemise nurkkiirus hantlite küljele tõmbamisel on võrdne
![]() .
.
Inimese tööd hantlite liigutamisel saab määrata süsteemi kineetilise energia muutmise kaudu
 2. Anname veel ühe katse Žukovski pingiga. Demonstraator istub või seisab pingil ja talle antakse kätte kiiresti pöörlev ratas, millel on vertikaalselt suunatud telg (joonis 5.18). Seejärel pöörab demonstrant ratast 180 0. Sel juhul kandub ratta impulssmomendi muutus täielikult üle pingile ja demonstraatorile. Selle tulemusena läheb pink koos demonstraatoriga pöörlema nurkkiirusega, mis määratakse nurkkiiruse jäävuse seaduse alusel.
2. Anname veel ühe katse Žukovski pingiga. Demonstraator istub või seisab pingil ja talle antakse kätte kiiresti pöörlev ratas, millel on vertikaalselt suunatud telg (joonis 5.18). Seejärel pöörab demonstrant ratast 180 0. Sel juhul kandub ratta impulssmomendi muutus täielikult üle pingile ja demonstraatorile. Selle tulemusena läheb pink koos demonstraatoriga pöörlema nurkkiirusega, mis määratakse nurkkiiruse jäävuse seaduse alusel.
Süsteemi impulssmoment algseisundis määratakse ainult ratta impulsi momendiga ja on võrdne
kus on ratta inertsimoment, kas selle pöörlemise nurkkiirus.
Pärast ratta pööramist 180 ° nurga all määratakse süsteemi nurkkiirus juba pingi nurgajõu ja isiku ratta nurkkiiruse summa põhjal. Võttes arvesse, et ratta nurkkiiruse vektor muutis oma suunda vastupidiseks ja selle projektsioon vertikaalteljele muutus negatiivseks, saame
![]() ,
,
kus on "mees-platvorm" süsteemi inertsimoment, kas on pingi pöörlemiskiirus koos mehega.
Vastavalt nurkkiiruse säilitamise seadusele
![]() ja
ja ![]() .
.
Selle tulemusena leiame pingi pöörlemiskiiruse
3. Õhuke varras massiga m ja pikkus l pöörleb nurkkiirusega ω = 10 s -1 horisontaaltasandil ümber varda keskosa läbiva vertikaaltelje. Jätkates samas tasapinnas pöörlemist, liigub latt nii, et pöörlemistelg läbib nüüd varda otsa. Teisel juhul leidke nurkkiirus.
Selle probleemi tõttu, kuna varda massi jaotus pöörlemistelje suhtes muutub, muutub ka varda inertsmoment. Vastavalt isoleeritud süsteemi nurkkiiruse säilitamise seadusele on meil
Siin on varda inertsmoment varda keskosa läbiva telje suhtes; ![]() - varda inertsmoment selle otsa läbiva telje ümber ja leitud Steineri teoreemi järgi.
- varda inertsmoment selle otsa läbiva telje ümber ja leitud Steineri teoreemi järgi.
Asendades need väljendid nurkkiiruse säilimise seadusse, saame
![]() ,
,
![]() .
.
4. Varda pikkus L= 1,5 m ja mass m 1= 10 kg ülemises otsas pööratavalt riputatud. Massikuul lööb varda keskele m 2= 10 g, lendab horisontaalselt kiirusega 500 m / s ja jääb vardasse kinni. Mis nurga all varras pärast lööki kõrvale kaldub?
Esitame joonisel fig. 5.19. interakteeruvate kehade süsteem "rod-bullet". Väliste jõudude (gravitatsioon, telje reaktsioon) momendid löögi hetkel on võrdsed nulliga, seega saame kasutada nurkkiiruse jäävuse seadust
 Süsteemi impulssmoment enne lööki on võrdne kuuli liikumismomendiga riputuspunkti suhtes
Süsteemi impulssmoment enne lööki on võrdne kuuli liikumismomendiga riputuspunkti suhtes
Süsteemi impulssmoment pärast elastset lööki määratakse valemiga
 ,
,
kus on varda inertsmoment riputuspunkti suhtes, on kuuli inertsimoment ja on varda nurkkiirus kuuliga vahetult pärast lööki.
Lahendades saadud võrrandi pärast asendamist, leiame
![]() .
.
Kasutame nüüd mehaanilise energia jäävuse seadust. Võrdsustame varda kineetilise energia pärast seda, kui selle potentsiaalse energia kuul on tabanud kõrgeimas tõusupunktis:
![]() ,
,
kus on antud süsteemi massikeskme tõusu kõrgus.
Pärast vajalike ümberkujunduste tegemist saame
![]()
Varda läbipaindenurk on suhtega seotud väärtusega
![]() .
.
Pärast arvutamist saame = 0,1p = 18 0.
5. Määrake Atwoodi masinal kehade kiirendus ja niidi pinge, eeldades seda (joonis 5.20). Ploki inertsimoment pöörlemistelje suhtes on Mina, ploki raadius r... Ärge arvestage niidi kaalu.
 Korraldame kõik koormustele ja plokile mõjuvad jõud ning koostame nende jaoks dünaamika võrrandid
Korraldame kõik koormustele ja plokile mõjuvad jõud ning koostame nende jaoks dünaamika võrrandid

Kui piki plokki niit ei libise, on lineaarne ja nurkkiirendus omavahel seotud suhtega
Neid võrrandeid lahendades saame
![]()
Siis leiame T 1 ja T 2.
 6. Oberbecki risti rihmaratta külge on kinnitatud niit (joonis 5.21), mille külge on riputatud raskus M= 0,5 kg. Määrake, kui kaua kulub koormuse laskumine kõrguselt h= 1 m alumisse asendisse. Rihmaratta raadius r= 3 cm Neli raskust massiga m= 250 g kaugel R= 30 cm oma teljest. Risti ja rihmaratta enda inertsmomenti tuleks kaalude inertsimomendiga võrreldes tähelepanuta jätta.
6. Oberbecki risti rihmaratta külge on kinnitatud niit (joonis 5.21), mille külge on riputatud raskus M= 0,5 kg. Määrake, kui kaua kulub koormuse laskumine kõrguselt h= 1 m alumisse asendisse. Rihmaratta raadius r= 3 cm Neli raskust massiga m= 250 g kaugel R= 30 cm oma teljest. Risti ja rihmaratta enda inertsmomenti tuleks kaalude inertsimomendiga võrreldes tähelepanuta jätta.
Pöörleva liikumise peamised dünaamilised omadused on nurkkiirus pöörlemistelje z suhtes:
ja kineetiline energia
Üldiselt leitakse nurkkiirusega pöörlemise ajal saadud energia järgmise valemi abil:
, kus on inertsi tensor.Termodünaamikas
Täpselt sama mõttekäigu kohaselt, nagu ka translatsioonilise liikumise puhul, eeldab varustus, et termilises tasakaalus on üheaatomilise gaasi iga osakese keskmine pöörlemisenergia: (3/2) k B T... Samamoodi võimaldab võrdse jaotumise teoreem arvutada molekulide efektiivse nurkkiiruse.
Vaata ka
Wikimedia Foundation. 2010.
Vaadake, mis on "pöörleva energia" teistes sõnaraamatutes:
Sellel terminil on muid tähendusi, vt Energia (tähendused). Energia, mõõde ... Vikipeedia
Liikumine- LIIKUMINE. Sisu: Geomeetria D .................... 452 Kinemaatika D ................... 456 Dünaamika D. ................... 461 Mootorimehhanismid ............ 465 Inimese uurimise meetodid D. ......... 471 Inimese patoloogia D. ............. 474 ... ... Suur meditsiiniline entsüklopeedia
Kineetiline energia on mehaanilise süsteemi energia, mis sõltub selle punktide liikumiskiirusest. Translatsioonilise ja pöörleva liikumise kineetiline energia on sageli isoleeritud. Rangemini öeldes on kineetiline energia erinevus kogu ... ... Vikipeedia vahel
Α -peptiidi termiline liikumine. Peptiidi moodustavate aatomite keeruline värisev liikumine on juhuslik ja üksiku aatomi energia kõigub laias vahemikus, kuid kasutades võrdsuse seadust, arvutatakse see iga inimese keskmise kineetilise energiana. Vikipeedia
Α -peptiidi termiline liikumine. Peptiidi moodustavate aatomite keeruline värisev liikumine on juhuslik ja üksiku aatomi energia kõigub laias vahemikus, kuid kasutades võrdsuse seadust, arvutatakse see iga inimese keskmise kineetilise energiana. Vikipeedia
- (prantsuse marées, saksa Gezeiten, inglise looded) perioodilised veetaseme kõikumised Kuu ja Päikese ligitõmbamise tõttu. Üldine informatsioon. P. on kõige märgatavam ookeanide kallastel. Kohe pärast mõõna ja mõõna ajal algab ookeani tase ... ... Entsüklopeediline sõnaraamat F.A. Brockhaus ja I.A. Efron
Külmutatud anum Elevandiluu Tirupati esialgne stabiilsus on negatiivne Stabiilsusvõime ... Wikipedia
Külmutatud laev Elevandiluu Tirupati esialgne stabiilsus on negatiivne Stabiilsus ujuva veesõiduki võime taluda väliseid jõude, mis põhjustavad selle veeremist või trimmimist ja pärast häiriva perioodi lõppu naasmist tasakaalu ...
Pöörleva keha kineetiline energia on võrdne kõigi kehaosakeste kineetiliste energiate summaga:
Mis tahes osakese mass, selle lineaarne (ümbermõõt) kiirus, võrdeline antud osakese kaugusega pöörlemisteljest. Asendades selle väljendi ja võttes välja summaarse nurkkiiruse o kõikide osakeste suhtes, mis asuvad väljaspool summa märki, leiame:
![]()
Seda pöörleva keha kineetilise energia valemit saab taandada translatsioonilise liikumise kineetilise energia avaldisega sarnasele vormile, kui tutvustame keha niinimetatud inertsmomendi väärtust. Materiaalse punkti inertsimomenti nimetatakse punkti massi korrutiseks selle kauguse ruuduga pöörlemisteljest. Keha inertsimoment on keha kõigi materiaalsete punktide inertsmomentide summa:
Niisiis, pöörleva keha kineetiline energia määratakse järgmise valemi abil:
Valem (2) erineb valemist, mis määrab keha kineetilise energia translatsioonilise liikumise ajal, selle poolest, et kehamassi asemel on siia lisatud inertsmoment I ja kiiruse asemel rühma kiirus
Pöörleva hooratta suurt kineetilist energiat kasutatakse tehnoloogias masina ühtluse säilitamiseks järsult muutuva koormuse korral. Esialgu tuleb suure inertsimomendiga hooratta pöörlemiseks masinalt märkimisväärselt tööd teha, kuid suure koormuse ootamatu sisselülitamisel masin ei peatu ja teeb tööd hooratta kineetilise energia varu.
Eriti massiivseid hoorattaid kasutatakse elektrimootoriga juhitavates valtsveskites. Siin on ühe sellise ratta kirjeldus: „Ratas on 3,5 m läbimõõduga ja kaalub. Normaalse kiirusega 600 p / min on ratta kineetilise energia varu selline, et ratas veeremise hetkel annab rattale veski võimsus 20 000 hj. koos. Laagrite hõõrdumist minimeerib muinasjutt rõhu all ja et vältida tsentrifugaalsete inertsijõudude kahjulikku toimet, on ratas tasakaalustatud nii, et ratta ümbermõõdule pandud koormus toob selle puhkeseisundist välja. "
Anname (ilma arvutusi tegemata) mõne keha inertsimomentide väärtused (eeldatakse, et kõigil neil kehadel on kõigis oma lõikudes sama tihedus).
Õhukese rõnga inertsmoment telje ümber, mis läbib selle keskpunkti ja on risti selle tasapinnaga (joonis 55):
Ringikujulise ketta (või silindri) inertsimoment selle keskpunkti läbiva ja selle tasapinnaga risti oleva telje suhtes (ketta polaarne inertsimoment; joonis 56):
Õhukese ümmarguse ketta inertsmoment telje ümber langeb kokku selle läbimõõduga (ketta ekvatoriaalne inertsimoment; joonis 57):
Palli inertsimoment kuuli keskpunkti läbiva telje ümber:
Õhukese sfäärilise raadiukihi inertsimoment keskpunkti läbiva telje suhtes:
Paksu sfäärilise kihi (õõneskera välispinna raadiuse ja õõnsuse raadiusega) inertsimoment tsentrit läbiva telje suhtes:
![]()



Kehade inertsmomentide arvutamine toimub integraalkalkulatsiooni abil. Et anda aimu selliste arvutuste käigust, leiame varda inertsmomendi selle suhtes risti oleva telje suhtes (joonis 58). Olgu varda ristlõige, tihedus. Valime varda elementaarse väikese osa, mille pikkus on ja mis asub pöörlemisteljest x kaugusel. Siis selle mass Kuna see asub pöörlemisteljest x kaugusel, siis selle inertsimoment integreerume vahemikku null kuni I:

Ristkülikukujulise rööptahuka inertsmoment sümmeetriatelje suhtes (joonis 59)
![]()
Rõnga toruse inertsimoment (joonis 60)
![]()
Mõelgem, kuidas mööda tasapinda veereva (ilma libisemiseta) keha pöörlemise energia on seotud selle keha translatsioonilise liikumise energiaga,
Veereva keha translatsioonilise liikumise energia on võrdne, kus on keha mass ja translatsioonilise liikumise kiirus. Lubage tähistada veereva keha pöörlemiskiirust ja keha raadiust. Lihtne on välja selgitada, et ilma libisemiseta veereva keha translatsioonilise liikumise kiirus on võrdne keha ümbermõõdu kiirusega keha tasandiga kokkupuutekohtades (ajal, mil keha teeb ühe pöörde, keha raskuskese liigutab kaugust, seetõttu
Seega,
![]()
Pöörleva energia
![]()
seega,
![]()


Asendades siin inertsmomentide ülaltoodud väärtused, leiame, et:
a) veereva rõnga pöörlemisliikumise energia on võrdne selle translatsiooniliikumise energiaga;
b) veereva homogeense ketta pöörlemisenergia on võrdne poolega translatsioonilise liikumise energiast;
c) veereva homogeense palli pöörlemisenergia on translatsioonilise liikumise energia.
Inertsmomendi sõltuvus pöörlemistelje asendist. Laske vardal (joonis 61), mille raskuskese on punktis C, pöörlema nurkkiirusega (ümber telje O, joonise tasapinnaga risti. Oletame, et teatud aja jooksul on see liikunud asendist AB asendisse raskuskeskme kirjeldas kaar See on varda liikumine, mida võib pidada nii, nagu varda liikus esmalt translatiivselt (st jääks iseendaga paralleelseks) asendisse ja seejärel pööraks ümber C asendisse. Ja B asendisse, liikumine iga selle osake on raskuskeskme nihkumisega ühesugune, see tähendab, et see on võrdne või varda tegeliku liikumise saamiseks võime eeldada, et mõlemad liigutused sooritatakse samaaegselt. ümber telje läbi O, võib jagada kaheks osaks.